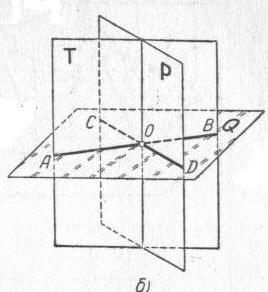
Пересекающийся прямые
| Алгоритм обработки |
| Загрузить исходник |
| Исходник |
|
global Boot,a,
n1,t0,t,nx,nxx,nxx2,xn,d,i,nn,ww,nx2,nxx5 --global L21,L22,L23,L24,L25,NNx2,NNy2 on beginsprite me my = sprite(me.spriteNum).member my.resetWorld() Boot =0 a=0 t0=0 t =0 n1 =0 --------------- nx=0 nx2=0 nxx=0 nxx2=0 nxx5=0 xn=0 d=1 i=1 nn=i+1 my.newTexture("backdrop",
#fromCastmember, member("sky")) my.camera(1).insertBackdrop(1,my.texture("backdrop"),
point(0,0),
0) ------------------------------------------------------------------------ set the url of member "Trousers"="Trousers.swa" ------------------------------------------------------------------------ ---------------------------------------------------------------- ---------------------------------------------------------------- ---1 шаг --Устанавливаем
систему
отсчета --put
member("my").model("Sphere01").transform.position ---- vector( 0.0000, 0.0000, 0.0000
) member("my").model("Sphere01").
transform.identity() ---------------------------------------------------------------- ---2 шаг
2.Устанавливаем начальные условия --
Задаем(устанавливаем) положение начальной точки относительно выбронной системы
отсчета. --Определяем
числовой
отрезок {40<=x<=100} member("my").model("Sphere01").transform.translate(0,0,0) --put
member("my").model("Sphere01").transform.position.x -- 40.0000 ---------------------------------------------------------------- myCicl
myCicl2 ---------------------------------------------------------------- ---------------------------------------------------------------- end on exitFrame me --set the url of member
"Trousers"="Trousers.swa" -- if (a=1)
then --музыка --Шаг1 myButton -- --Шаг2 myobrabotkanew ----перемещаем созданный шар нужну точку
пространства myobrabotkanew11 --Шаг3 myobrabotkanew2 ---- выравниваем перемещенный заданный шар myobrabotkanew21 --Шаг4 myobrabotkanew3 ----Кланируем myobrabotkanew32 --Шаг5
myobrabotkanew4 ---"-"-осуществляет движение в отрицательном и
положительном направлении myobrabotkanew5 ---"+"- myobrabotkanew51 -------------------------------------------- n1 =n1 +
1--счетчик -------------------------------------------- --Алгорим
обработки Round --Шаг за
шагом --1 шаг end if --Sphere01 go the frame end --
создания обработки данных --Button on myButton if Boot=0 then
--set the url of member
"Trousers"="Trousers.swa" play (member
"Trousers") Boot=1 end if end --myButton ---- on Round ------------------------------------------------------------ ----------------------------------------------------- --------------------------------------------- ----------------------------------------- t = t0+(n1-1)*0.35 --сущность
всей
системы --Где --h(n)-h(0) =h(n)-h(n-1) =h(n+1)-h(n) =1
--приращение --h0-начальное
условие -- n1 -
счетчик ----------------------------------------- --------------------------------------------- ----------------------------------------------------- member("my").model("Sphere01").rotate(5,5,5) --abs(-1) --power(1.6,2) end --
Round --создания
исходных данных --содаем
шар on
myCicl --Количество
шаров n-целая часть repeat with n = 1
to 1 S777 = string(n) member("my").model("Sphere01").clone("Sphere"&S777) end
repeat end
--Количество
шаров n-целая часть2 on myCicl2 repeat with n = 1
to 1 S777 = string(n) member("my").model("Sphere01").clone("Spherea"&S777) end
repeat end
--перемещаем
созданный шар нужну точку пространства on myobrabotkanew if member("my").model("Sphere1").transform.position.x
<= 306.0000
then member("my").model("Sphere"&1).translate(2,0,0,#world) end
if end --
myobrabotka --перемещаем
созданный шар нужну точку пространства on myobrabotkanew11 if member("my").model("Spherea1").transform.position.x
<= 100.0000
then member("my").model("Spherea1").translate(2,0,0,#world) end if end -- myobrabotkanew11 on myobrabotkanew2 -- выравниваем
перемещенный заданный
шар if (member("my").model("Sphere1").transform.position.x
>= 306.0000)
then member("my").model("Sphere1").transform.position.x= 306.0000 nx=1 end if end -- myobrabotkanew2 on myobrabotkanew21 -- выравниваем
перемещенный заданный
шар2 if (member("my").model("Spherea1").transform.position.x
>= 100.0000)
then member("my").model("Spherea1").transform.position.x= 100.0000 nx2=1 end if end -- myobrabotkanew2 --Кланируем 1 и
Кланируем 2 on myobrabotkanew3 if (nx=1)
AND (nxx=0)
then repeat with n = 1
to 20 S777 = string(n) member("my").model("Sphere1").clone("Sphere2"&S777) member("my").model("Sphere1").clone("Sphere3"&S777) end repeat nxx=1 end if end -- myobrabotkanew3 on myobrabotkanew32 if (nx2=1) AND (nxx5=0)
then repeat with n = 1
to 20 S777 = string(n) member("my").model("Spherea1").clone("Spherea2"&S777) end repeat nxx5=1 end if end -- myobrabotkanew3 --осуществляет
движение --осуществляет
движение в отрицательном движение on myobrabotkanew4 if (nxx=1) AND (nxx2=0) then x0 = 306 R=8 repeat with n = 1
to 15 x= x0-2*1*R*n -- функциональная зависимость между координатой и номер
шара --Кананическое
уравнение if member("my").model("Sphere2"&n).transform.position.x
>= x
then member("my").model("Sphere2"&n).translate(-2,0,2,#world) end if end repeat --put 1 --nxx2=1 end if end --
myobrabotkanew4 --осуществляет
движение в положительном движение движение on myobrabotkanew5 --if (nxx=1) AND (nxx2=0) then if (nxx=1)
then x0 = 306 R=8 repeat
with n
= 1 to 15 x= x0+2*1*R*n -- функциональная зависимость между координатой и номер
шара ----------------------------------------------------------------------------- --Кананическое
уравнение if member("my").model("Sphere3"&n).transform.position.x
<= x
then member("my").model("Sphere3"&n).translate(4,0,0,#world) end if end repeat end if end --
myobrabotkanew5 on myobrabotkanew51 if (nx2=1) then x0 = 100 R=8 repeat with n = 1
to 15 x= x0+2*1*R*n -- функциональная зависимость между координатой и номер
шара ----------------------------------------------------------------------------- --Кананическое
уравнение if member("my").model("Spherea2"&n).transform.position.x
<= x
then member("my").model("Spherea2"&n).translate(2,0,2,#world) end if end repeat end if end --
myobrabotkanew51
|